Modulárna koncepcia terénneho vozíka určeného pre hendikepované osoby
V súčasnosti sa kladie aj v súvislosti s riešením vývojových a inovačných projektov dôraz na zlepšenie životného štandardu hendikepovaných osôb, ktoré sa každodenne stretávajú s prekážkami či už v mestských podmienkach (obrubníky, schody…), alebo pri rekreačných činnostiach (turistika, rybolov, kultúrne podujatia...). Veľmi často sú hendikepované osoby odkázané na pomoc druhých osôb. Osoby s telesným postihnutím sa podľa Dohovoru OSN o právach osôb so zdravotným postihnutím majú podporovať a majú sa presadzovať ich práva. Cieľom týchto opatrení je zabezpečiť ich podporu pri vlastných rozhodnutiach a posilniť plnohodnotné začlenenie do spoločnosti. Požiadavky na všestranne vyhovujúcu a efektívnu konštrukciu invalidného vozíka možno zahrnúť do nasledujúcich bodov: Jednoduchosť konštrukcie, modulárnosť – variabilita konštrukcie, nízke výrobné náklady, bezpečnosť, pohodlie, ergonómia, prejazdnosť terénom, zdolávanie mestských prekážok, stabilita, zachovanie stabilnej polohy hendikepovaného pri prejazde schodiskom, kompaktné rozmery (limitované šírkou dverí, priestorom vo výťahu a pod.), rôzne možnosti pohonu. Tieto požiadavky treba v maximálne možnej miere zapracovať do ideového návrhu vozíka, ktorý musí spĺňať aj estetické a tvarové požiadavky (obr. 1).


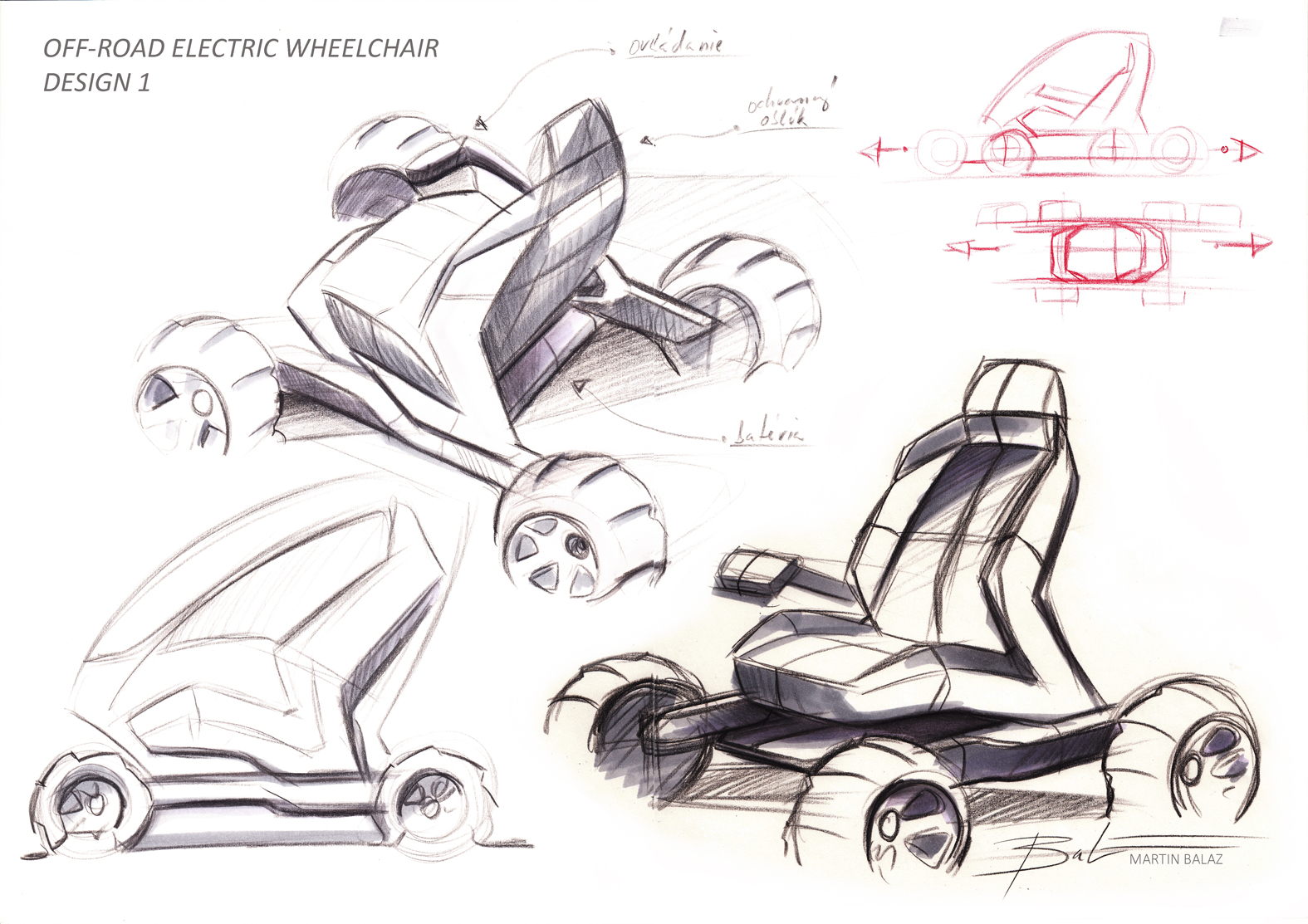
Koncept a konštrukcia vozíka
Vychádza z požiadaviek uvedených vyššie a musí spĺňať predpisy platné na území SR. Základom konceptu je dizajnérsky návrh Mgr. art. Martina Baláža, ArtD., z Fakulty architektúry STU v Bratislave. Od tohto návrhu sa odvíja konštrukčné riešenie, ktoré zohľadňuje aj mechanickú konštrukciu a vlastnosti invalidného vozíka. Skladá sa z troch hlavných častí.
Podvozková časť
Podvozková časť je základným nosným prvkom vozíka. Skladá sa z rámu, ktorý slúži na uchytenie častí náprav, sedačky a na umiestnenie a ochranu elektrických častí vozíka, ako je napr. akumulátor a riadiaca jednotka. Ďalším prvkom je samotná náprava vyhotovená ako výkyvná, jej ramená sú k rámu na každej strane vozíka upevnené pomocou centrálneho čapu, vďaka čomu sa predné a zadné ramená otáčajú okolo jednej a tej istej osi. V strede ramena je náprava odpružená dvojicou pružina – tlmič. Náboj kolesa je umiestnený na opačnom konci ramena a jeho komponenty sú závislé od typu pohonu. Posledným prvkom podvozka je koleso, ktoré môže byť rôznej konštrukcie zohľadňujúcej samotné využitie vozíka. V prípade malých terénnych kolies (obr. 2) je možné použiť aj konfi guráciu využívajúcu OTT – Over the tire track pásy (obr. 5), pričom treba ramená nápravy proti sebe poistiť.
Pohonná jednotka
Ďalšou časťou je pohonná jednotka, ktorá je navrhnutá vo dvoch variantoch, t. j. ako manuálny alebo elektrický pohon. Manuálny pohon (obr. 3) je zabezpečený prácou svalov, ktorá sa prenáša prostredníctvom pákového mechanizmu cez reťazový prevod na hnacie kolesá. Dôležitou časťou manuálneho hnacieho mechanizmu je jeho optimalizácia s dôrazom na minimalizáciu ergonomických síl pri maximalizácií hnacej sily. Pre navrhnutie správneho prevodu je dôležité dodržať určitú minimálnu rýchlosť pohybu vozíka s dôrazom na jeho manévrovateľnosť v náročných a stiesnených podmienkach. Primárny pohon vozíka (obr. 4) je riešený elektromotorom, pretože takýto vozík je určený pre hendikepovaných s ťažkým telesným postihnutím. Samotná modulárna konštrukcia však nevylučuje kombináciu oboch spôsobov pohonu. Elektrický pohon je riešený v niekoľkých variantoch, najjednoduchší variant je umiestnenie elektromotora v strede medzi nápravami. Toto riešenie slúži ako doplnok k manuálnemu pohonu invalidného vozíka. Ďalším variantom je umiestnenie elektromotora do náboja kolesa, čim vzniká možnosť pohonu dvoch alebo štyroch kolies, v závislosti od potrebných jazdných parametrov. S týmto riešením je úzko spätá aj cena, keďže pribudnú ďalšie elektromotory s trakčnou jednotkou. Toto riešenie vyžaduje špecifi cký elektromotor s vhodnými parametrami ako napr. nižšie otáčky s dostatočným krútiacim momentom na pokrytie jazdných odporov. Z podstaty riadenia vozíka je vždy dôležité použitie dvojice elektromotorov, t. j. musí byť poháňaná jedna strana vozíka nezávisle od druhej, keďže ide o šmykom riadený invalidný vozík. Hlavným prvkom pohonnej jednotky je výkonová riadiaca elektronika, ktorá vyhodnocuje jazdu a riadi pohon vozíka tak, aby dosiahol dostatočné jazdné výkony v závislosti od terénu a jazdných odporov. Zdrojom energie je LiFePO4 akumulátor umiestnený v ráme vozíka. Prúdové špičky možno vykryť pomocou superkondenzátorov. Riadenie rýchlosti a smeru je možné buď pomocou pák manuálneho pohonu (v prípade motora v strede medzi nápravami), kde sú smer a veľkosť rýchlosti kolesa na stranu určené polohou páky. Ťahaním k sebe sa bude koleso otáčať smerom dozadu alebo, naopak, zatlačením od seba smerom dopredu. Ďalšou možnosťou je ovládanie pomocou ergonomického pákového ovládača, avšak to je využiteľné len pri plne elektrickom vyhotovení.


Posadenie hendikepovanej osoby
Sedadlo a súvisiace komponenty sú poslednou, ale pomerne najdôležitejšou časťou invalidného vozíka. Ergonómia sedadla musí byť navrhnutá tak, aby umožňovala hendikepovanému bezpečný a komfortný pohyb v teréne (alebo po predpokladanom podloží...). Dôležitý je nielen tvar sedadla, ale aj použité materiály, aby vibrácie spôsobené pohybom boli pohltené a aby nepôsobili veľké tlaky na vnútornú kostru hendikepovaného. V prípade plne elektrického invalidného vozíka je hendikepovanému umožnené ovládanie pomocou pákového ovládača použitím jednej ruky, ktorý je umiestnený na konci opierky ruky. Túto opierku možno optimálne nastaviť individuálne podľa potreby. Poslednou, nie menej dôležitou časťou je podložka na nohy. V rámci prototypu vozíka bude navrhnutá aj bezpečnostná kabína chrániaca jazdca pri prevrátení, resp. pred poveternostnými vplyvmi. Na zvýšenie bezpečnosti pri prejazde schodiskom sa bude sedadlo naklápať tak, aby bola neustále udržovaná vodorovná poloha (obr. 3).
Modulárna konštrukcia
Jednou z hlavných požiadaviek na prototypový návrh terénneho invalidného vozíka je jeho modularita. V súčasnosti je trendom vytváranie konštrukcií, ktoré sú modulárne a dajú sa jednoducho prispôsobovať alebo obmieňať. Jej výhodou je možnosť vytvorenia výrobku na mieru s minimalizáciou vzniknutých výrobných nákladov, či už materiálových, alebo fi nančných. Ďalšou výhodou modulárnej konštrukcie je jej fl exibilita a jednoduchá aktualizácia, vylepšenie alebo modernizácia jednotlivých modulov, napr. aktualizácia na pohon 4 x 4, doplnenie batérie na zvýšenie dojazdu, doplnenie pásov pre ťažký terén, prípadne iné požiadavky. V súčasnosti je pripravená stavba prototypu podľa vyhotovenej technickej dokumentácie pre variant úplne elektrického invalidného vozíka určeného do ľahkého a stredne ťažkého terénu. V rámci tohto projektu bude projekčne navrhnutý pojazdný vozík a postavený jeho prototyp, na ktorom bude možné overiť navrhnutú nosnú konštrukciu a jej vlastnosti, ale taktiež trakčné vlastnosti a následne optimalizovať jeho technické parametre.
Ing. Michal Šlauka
Strojnícka fakulta STU v Bratislave
Ing. Tomáš Liedl
Strojnícka fakulta STU v Bratislave
Mgr. art. Martin Baláž, ArtD.
Fakulta architektúry STU v Bratislave
Literatúra:
[1] MAZURKIEVIČ I., GULAN L., IZRA EL G.,
Mobilné pracovné stroje: teória a konštrukcia základných
modulov. 1. vyd. Bratislava: Slovenská technická univerzita
v Bratislave, 2013. 301 s. ISBN 9788022739689, [2]
ISO 7176-1:2014, Determination of static stability, 2014.
[3] ISO 7176-2:2001, Determination of dynamic stability
of electricwheelchairs, 2009. [4] ISO 7176-5:2008,
Determination of dimensions, mass and manoeuvringspace,
2012. [5] ISO 7176-7:1998, Measurement of
seating and wheeldimensions, 2013. [6] ISO 7176-
28:2012, Requirements and test methodsforstair-climbingdevices, 2012.